Beregning af en fri opstilling i UTM
[redigér]
På ovennævnte skitse er totalstationen opstillet et tilfældigt sted i punkt A. Koordinaterne til punkt A beregnes ved, at der måles både afstand og retning til punkt A og B, som er to kendte punkter.
Først beregnes  ved at trække retningen mod punkt C fra retninen mod punkt B - dvs.:
ved at trække retningen mod punkt C fra retninen mod punkt B - dvs.:

Afstanden a beregnes derefter ud fra koordinaterne til punkt B og C ved hjælp af afstandsformlen:

Retningsvinklen fra punkt B til C beregnes herefter ud fra følgende formel:
 .
.
 skal herefter beregnes. Dette gør vi indirekte ved at beregne
skal herefter beregnes. Dette gør vi indirekte ved at beregne  , hvorefter kan beregnes. beregnes ved hjælp af sinusrelationen.
, hvorefter kan beregnes. beregnes ved hjælp af sinusrelationen.
 .
.
beregnes herefter vha. følgende formel:
 .
.
Punkt A's koordinater kan nu beregnes ud fra følgende formler:


Eksempel
Der er målt en fri opstilling med følgende observationer:
| Observationer:
|
Opst. i punkt A
|
| Pkt. |
retning |
vandret afstand
|
| B |
3,173 |
263,043
|
| C |
90,368 |
-
|
| Koordinater:
|
| Pkt. |
N |
E
|
| B |
137,15 |
219,32
|
| C |
319,23 |
412,19
|
Vinkel A kan beregnes ud fra de to retninger:

Afstanden mellem punkt B og C:

Retningsvinklen fra B mod C:

Det ses, at både tæller og nævner er positive, hvorfor der skal lægges 0 gon til retningsvinklen, som så bliver:

Vinkel B bliver herefter:


A's koordinater bliver hermed:


Beregning af en fri opstilling i System-34
[redigér]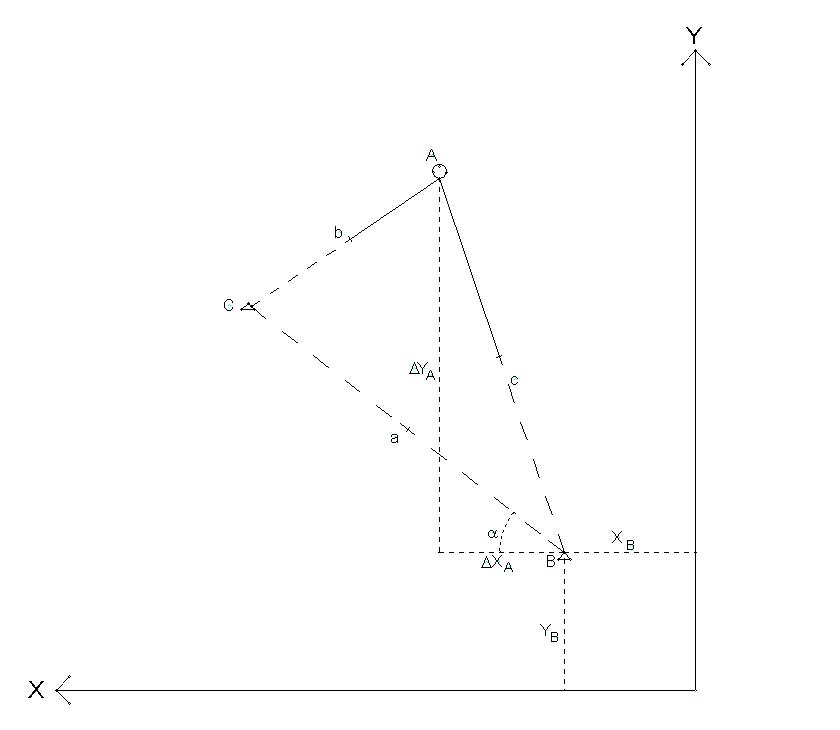
På ovennævnte skitse er totalstationen opstillet et tilfældigt sted i punkt A. Koordinaterne til punkt A beregnes ved, at der måles både afstand og retning til punkt A og B, som er to kendte punkter.
Først beregnes ved at trække retningen mod punkt C fra retninen mod punkt B - dvs.:
Afstanden a beregnes derefter ud fra koordinaterne til punkt B og C ved hjælp af afstandsformlen:

Retningsvinklen fra punkt B til C beregnes herefter ud fra følgende formel:
 .
.
skal herefter beregnes. Dette gør vi indirekte ved at beregne , hvorefter kan beregnes. beregnes ved hjælp af sinusrelationen.
.
beregnes herefter vha. følgende formel:
.
Punkt A's koordinater kan nu beregnes ud fra følgende formler:


Eksempel
Der er målt en fri opstilling med følgende observationer:
| Observationer:
|
Opst. i punkt A
|
| Pkt. |
retning |
vandret afstand
|
| B |
3,173 |
263,043
|
| C |
90,368 |
-
|
| Koordinater:
|
| Pkt. |
Y |
X
|
| B |
219,32 |
137,15
|
| C |
412,19 |
319,23
|
Vinkel A kan beregnes ud fra de to retninger:
Afstanden mellem punkt B og C:
Retningsvinklen fra B mod C:
Det ses, at både tæller og nævner er positive, hvorfor der skal lægges 0 gon til retningsvinklen, som så bliver:
Vinkel B bliver herefter:
A's koordinater bliver hermed:


I dette eksempel er der målt det absolut minimum af observationer. Målingen er kun bestemt. Dermed vil en evt. grov fejl i observationerne ikke kunne opdages i beregningerne. I praksis vil man altid forsøge at indmålte retninger og afstande til mindst 3 punkter således, at den frie opstilling er overbestemt. Dermed vil man kunne kombinere de forskellige observationer på forskellig vis i beregningerne - med tre kendte punkter kan der dannes 3 vinkårlige trekanter, hvori opstillingspunktet indgår. Dette vil medfører - såfremt der ikke er grove fejl i observationerne - at de beregnede koordinater til punt A vil blive de samme inden for målenøjagtigheden uanset hvilke observationer, der kombineres.
I dette tilfælde vil det bedste koordinatsæt til punkt A være gennemsnittet af de beregnede koordinater ud fra de 3 vilkårlige trekanter. Der findes også beregningsmetoder, hvor man på en gang kan beregne ét koordinatsæt til punkt A ud fra alle observationerne. Denne metode kaldes for udjævning.


